Overview
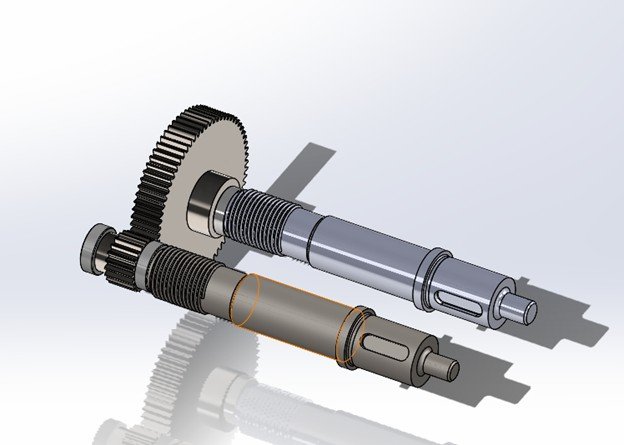
Semester-long machine design project: a compact, single-stage spur-gear reduction gearbox for an agricultural irrigation pump, designed for environments where reliability and simple maintenance are critical. The work was primarily analytical, applying methods from Shigley's Mechanical Engineering Design to take the system from load requirements to a fully specified assembly.
My role
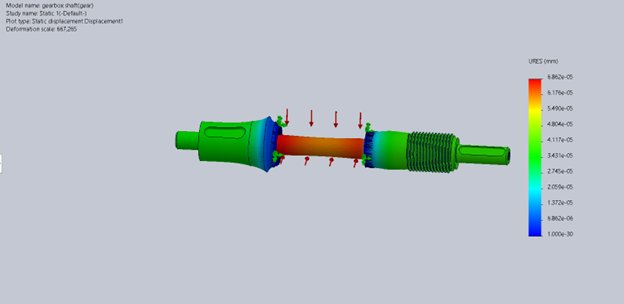
Led the analytical design and CAD modeling end-to-end: load calculations, gear geometry selection (Boston Gear YF70 gear / YF20 pinion), custom shaft sizing, bearing selection against a 4,000-hour life requirement, and validation of the design against torque, stress, and service-life constraints, including FEA on the shaft.
What it demonstrates
- Gear stress analysis and torque transmission
- Shaft sizing with fatigue and stress-concentration checks
- Bearing life (L10) calculations and selection
- Mechanical layout of a complete gearbox system
| Input power | 9 hp |
| Input speed | 1500 rpm |
| Reduction ratio | 3.5 : 1 |
| Output speed | ≈ 430 rpm |
| Bearing life | 4,000 h |
| Gear type | 20° spur |